Robótica de malla aplicada a la medición de la calidad del agua y la calidad de aire en los puertos mediante una malla de robots/balizas
Proyecto CRANC - PORTS 4.0 categoría Idea
Link de descarga del documento: proyecto_CRANC_resumen contenido_web_para_subsanaciones.pdf
https://drive.google.com/file/d/1035X-jlV60K8U3gW8LhYtfGUcVMiCnw1/view?usp=sharing
documento en pdf integra todo el texto del proyecto CRANC incluido en la web



Hemos desarrollado el proyecto CRANC en la categoría idea gracias a la convocatoria Ports 4.0.
Hemos innovado e iterado en cada evolución de nuestros prototipos, para en esta convocatoria, los tres meses anteriores y los tres posteriores, 12 meses en total conseguir validar la idea, desechar todo lo que no facilitaría el paso al siguiente nivel "pre-industrial" y avanzar todo los posible en la preparación de los prototipos para ser el punto de partida de la siguiente fase, en las que las pruebas de concepto serán en un entorno real y los prototipos incorporaran soluciones pre-industriales.
Punto de partida
Prototipo anterior a la participacion en el proyecto CRANC de robot Emme capaz de ir por tierra, sobre el agua y por debajo de ella
IDEA APROBADA, COMENZAMOS A TRABAJAR
EL PUNTO DE PARTIDA CAMBIA, tenemos que reinventar nuestra forma de diseñar y fabricar robots
Asimilando que una malla de robots tiene que ser viable a nivel económico, en su diseño-rediseño-fabricación y mantenimiento nos damos cuenta que nuestro punto de partida "El prototipo Emme" deber reinventarse de cero.
A nivel concepto su sistema modular, la independencia de sus motores con unidades de energía independientes y su facilidad de montaje si nos valen.
La dificultad de fabricación en categoría industrial, debido a la complejidad en la forma de ciertas piezas, la utilización de motores que están en contacto con el agua con su elevado precio. La necesidad de juntas para la estanqueidad y la necesidad de conectores estancos para la carga de la energía y para la programación de los procesadores internos "firmware", nos llevan a replantear todas las tareas comprometidas y el cronograma completo.
La decisión es innovar y partir de cero para resolver los siguientes problemas:
Diseño mecánico/fabricación: Complejidad de fabricación de moldes para la industrialización, complejidad en la fabricación por inyección. Elevado numero de piezas distintas.
Sistemas de energía, baterías y programación de los chips: Utilización de juntas para la estanqueidad dado a la necesidad de acceder a elementos del interior del robot en su día a día en los prototipos en su futura explotación. "Carga de energía, programación o reprogramación del firmware"
Sistemas de tracción: Motores de elevado coste para que resistan el contacto con el agua, o motores interiores y salida del eje al exterior con la necesidad de una comunicación interior exterior mediante eje que tendría que ser estanca y es una solución que queremos evitar.
Nuevo reto, diseñar desde cero, nuevo cronograma, nuevos entregables
Evolución de la idea en los meses previos al plazo de ejecución de la convocatoria
Es 4 de Julio del 2022, nos llega la gran noticia de la aprobación del proyecto CRANC en categoría IDEA, esta gran noticia y la posibilidad de avanzar durante todo el verano antes del plazo de ejecución oficial, nos lleva a plantearnos un nuevo comienzo.
Emme es un buen robot, pero nos preocupa en profundidad los futuros costes de producción, como el de varios componentes necesarios y de muy elevado coste, como los motores que son exteriores a los módulos y por lo tanto resistentes al agua, y los chips utilizado en Emme tanto para el comportamiento como para el control.
Esto nos lleva a tomar la decisión de empezar otra vez con otros motores y chips de bajo coste, y varias soluciones por innovar para resolver que estos motores deben ir dentro del robot ya que no resisten el agua, y además, no queremos que su eje salga desde dentro ya que dificultaría la estanqueidad de los módulos.
Comenzamos a pensar en diseñar un sistema de tracción magnético que crearía un eje virtual entre el interior del robot y el exterior, carga inalámbrica de baterías, puentes de transmisión de energía inalámbrica entre módulos y carga del firmware en los chips también de forma inalámbrica.
Necesidad de nuevas soluciones, cronogramas y entregables
Aceptamos el reto de empezar de cero, aquí aparece el vertigo, ya que no tenemos experiencia en transmisión del par motor mediante un eje virtual magnético, no tenemos experiencia en transmisión de energía inhlambrica para sistemas con necesidad de potencia instantánea "motores", y tampoco tenemos clara la estabilidad del software para la actualización del firmware de los chips de forma remota sin cable.
Esto implica de forma directa que el cronograma que teníamos propuesto, los entregables y las pruebas de campo están comprometidas a las nuevas soluciones que necesitamos innovar y desarrollar para los nuevos robots propuestos.
Julio, Agosto y Septiembre serán una carrera de fondo en el desarrollo y las pruebas de viabilidad de estas nuevas soluciones, esta fase la llamaremos evolución primera, y será el anticipo de varias mas en una carrera hacia adelante para conseguir ser capaces de entender de una nueva forma el diseño, fabricación y prueba de nuestros prototipos en el plazo de ejecución de la convocatoria.
En cada una de las evoluciones estaremos probando funcionalidades, al mismo tiempo que planteamos nuevas evoluciones al encontrarnos con problemas no solucionables en la evolución actual y su diseño mecánico/geométrico.
Llegaremos dentro del plazo de ejecución hasta la evolución 3, mientras estamos concibiendo la cuarta evolución. Con la evolución tercera ya los prototipos son funcionales, el método de fabricación, montaje y prueba es mucho mas corto que en las evoluciones anteriores. En esta evolución también podremos fabricar una primera malla y desarrollar para esta un software de nube para probar funcionalidades de grupo y por fin tener acceso desde una aplicación remota a control de los robots y a la visualización de los datos adquiridos por sus sensores.
Esta evolución tercera nos permite llegar a un TRL entre 4 y 5, al haber podido realizar pruebas a fondo en laboratorio y una aproximación a entornos reales como playa, agua de mar, oleaje, y suelos de diferentes tipos.
EVOLUCIÓN PRIMERA – SEGUNDA Y TERCERA (3 meses previos al plazo oficial + 6 meses del plazo oficial)
Es 4 de Julio del 2022, sabemos que han aprobado la idea CRAN es una realidad gracias a la convocatoria Ports 4.0, no sabemos cuando empieza el plazo oficial para los 6 meses que tendremos para el desarrollo de la idea. Lo que si sabemos es que el robot Emme de cual podriamos fabricar una preserie de varios robots modificada para cada uno de los escenarios de prueba en la categoria idea no es lo adecuado. No nos permitiria avanzar una vez comprobada la idea, y cumplido con el plazo, hacia la siguiente fase del proyecto "la fase pre-comercial".
Tenemos identificados los cambios que tendrian que tener los nuevos prototipos con respecto a lo aprendido y desarrollado con "Emme". La idea de solo dibujar formas geometricas sencillas, tanto en los bocetos de papel con el los diseños 3D nos intimida, nunca hemos diseñado con una limitación/especificación similar. Que un robot solot tenga piezas cubicas es ideal para su fabricación mecanica con impresoras 3D, y para su posterior fabricación industrial por injección, tanto la sencillez de los moldes ayudara a un bajo coste, como el tiempo de maquina por pieza y su posterior tiempo de montaje/ensamblado en el producto acabado.
Si a esto le unimos la decisión de no utilizar juntas, y que no haya comunicación mecánica entre partes interna y externas, acota aun mas las posibilidades de diseño. El no utilizar juntas de estanqueidad nos lleva a la decisión que un modulo del robot una vez montado, se cierra con pegamento, resina, etc. Esto a nivel estanqueidad es perfecto. Solo queda resolver como hacer llegar la energía dentro de los módulos en el momento de cargarlos, y como hacer girar un elemento de tracción "rueda, pala, garra" externo a los módulos y necesario para el avance del robot, sin utilizar un motor que aguante el agua, o perforar el modulo de dentro a fuera para sacar el eje del motor, cosa que también hemos decidido no hacer.
Evolución primera EV1, EV2 Y EV3






Se ha desarrollado una cuarta evolución y una PoC en el puerto de Alicante en el trimestre posterior a la finalización del plazo de ejecución de la convocatoria, esta evolución forma parte del "despues de" del proyecto, y ha permitido aplicar la nueva forma de diseñar, probar y fabricar prototipos para robotica de malla gracias a los conocimientos adquiridos en el desarrollo de la convocatoria.
Evolución cuarta EV4

Primera evolución
Los robots modulan en cuadrados/cubos
Se realizan pruebas en tres tamaños: pequeño, mediano y grande
Se desarrolla el software en Arduino IDE
Se selecciona el chip ESP32 con wifi y BLE para todos los modulos
Se prueban dos tipos de motor los N20 de muy pequeño tamaño "10 gramos" para los robots pequeños y motores paso a paso Nema17 de unos 300 gramos para los robots medianos
Se desarrolla firmware base para el control de motores, medición de corriente, comunicaciones wifi, sonorización y medición de corriente
Mecánicamente solo se acaban los tamaños pequeño y mediano
El excesivo número de módulos es decisivo para la siguiente iteración, tienen demasiadas uniones magnéticas y demasiados puentes de energía entre módulos
Se fabrican dos robots uno pequeño y uno mediano, no llegan a funcionar por completo, se desmontan al aplicar la potencia, no es viable seguir resolviendo los problemas de unión entre módulos y los problemas de transmisión de la energía











Caracteristicas pricipales en cada evolución
Segunda evolución
Los robots modulan en dos rectángulos, uno longitudinal y otro transversal
El modulo longitudinal tiene el sistema de energía, el de comportamiento y los sensores
El modulo transversal tiene los sistemas de tracción y un sistema de comportamiento para controlar los motores y el consumo de energía recibida
Se fabrican 2 robots medianos y cuatro robots pequeños
El sistema de energía principal falla y colapsa quemándose, tres de los robots pequeños se quema su módulo longitudinal
En los robot medianos se incorporar baterías complementarias en el módulo de motores, la energía que se pasa desde el modulo longitudinal se utiliza para activar el modulo de comportamiento de los motores.
Se prueban las soluciones de estanqueidad cerrando los módulos mediante pegamento "se utiliza silicona", la estanqueidad funciona
Los chips se programan por cable e inalámbrica
El problema de no estabilidad en la programación de los chips de forma inalámbrica y el colapso de los sistemas de energía, no permiten dejar los módulos cerrados para ser estancos, si se hacen pruebas de estanqueidad luego hay que romper los módulos para abrirlos y fabricar otros.
Se comienzan a hacer pruebas con la nube
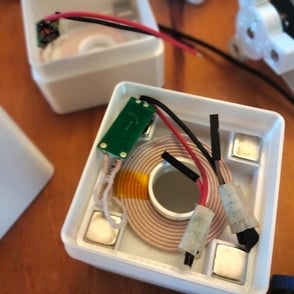
Robot pequeño EV2 - Alimentación USB + Puente de energía
Prueba de consumo y alimentación inalámbrica entre la cola y el modulo de tracción. Sistema de tracción externo "ruedas cuadradas" con dos garras.









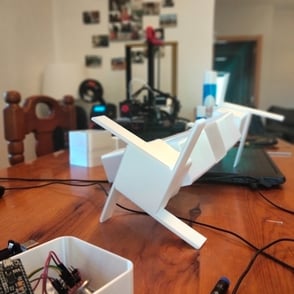
Robot mediano EV2 - configurado con cola - hub de sensores y ruedas de 8 puntas
Componentes del robot:
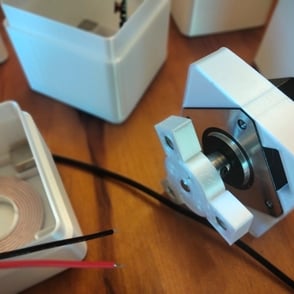
Rectángulo transversal con motores - eje magnético virtual
Dos rectángulos longitudinales el delantero con hub para tres sensores y con puente de energía al de los motores, el trasero es la cola
Un cubo que se parte en cuatro cuadrados, dos en cada lado para hacer de "ruedas" configuran una estrella de 8 puntas en cada lado





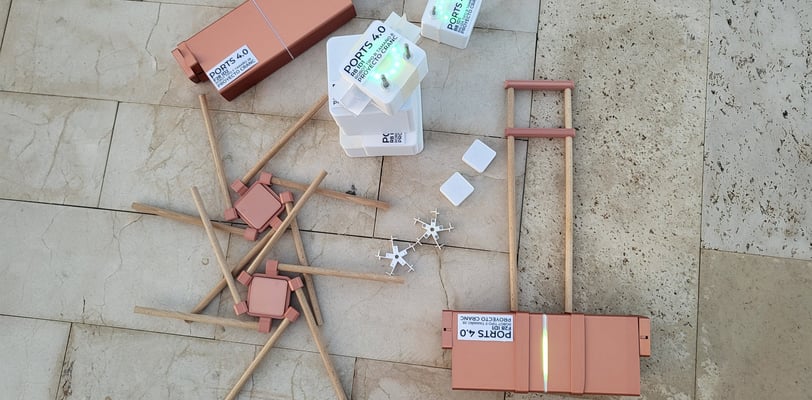
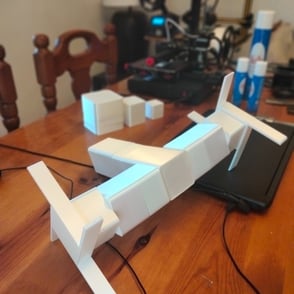
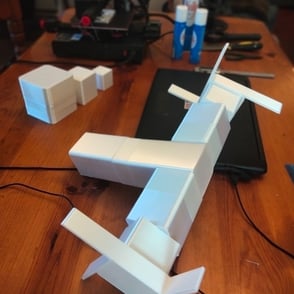
Robot mediano EV2 - desmontado y formando parte de la decoración de una casa
La sencillez que hemos conseguido en la modularidad queda patente cuando desmontamos el robot y puede integrarse en cualquier espacio, incluso una casa
Tercera evolución
Los robots se basan en un módulo único cuadrado
El modulo puede ser un robot si tiene motores, una baliza sino se le instan motores y se le instalan sensores, o un robot con sensores si se le instalan ambas cosas
Se fabrican a nivel mecánico 10 robots/balizas de tamaño pequeño, 3 robots/balizas tamaño mediano y dos robots/balizas tamaño grande para poder incorporar por primera vez motores nema 17 con reductora.
Se preparan 6 robots para pruebas, 4 tamaño pequeño y 2 de tamaño mediano y grande (estos comparten electronica)
Se queman en pruebas con agua salada en el mar dos de los pequeños.
Se preparan 4 balizas para pruebas
El máximo tamaño de malla probado en la nube es de 10 unidades entre robots y balizas (seis robots y cuatro balizas)
El máximo grupo de robots probados en la nube es de seis robots 4 pequeños y 2 medianos.
Se tiene elementos suficientes para montar hasta 10 robots pequeños y 4 robots medianos, no se preparan mas conjuntos por el elevado coste en tiempo de soldar y montar conjuntos completos
El software de nube se programa y configura en Arduino IOT Cloud, este servicio de pago se sincroniza con Arduino IDE usado hasta ahora y permite desarrollar a la vez la parte del firmware que va en los robots, como los dashboards de la aplicación remota mediante la nube, tanto para controlar los robots, como para adquirir los datos de la malla internos del robot y los datos externos de sus sensores
El software de nube se desarrolla por completo para las PoC, el único problema es la inestabilidad del sistema que proporciona para la carga remota e inalámbrica para la actualización del firmware de los chips de los robots
El problema de la inestabilidad de la carga del firmaw3ere nos impide cerrar los robot de forma permanente para hacerlos estancos
Robot pequeño Ev3 con sistema de tracción en cascada
Robot pequeño Ev3 con tres sistemas de tracción "tracción mixta" en cada lado conectados magnéticamente en cascada: "rueda cuadrada" "garras de 5 puntas con palas" y palas de agua. Sistema de comportamiento básico con comportamiento autónomo y comunicación de sus decisiones mediante cambio de color de sus luces internas. Prueba de tracción, gestión de la potencia necesaria para mover sistema de tracción mixto. Superficie en la prueba: vidrio "vitrocerámico"
Robots Ev3 en tres tamaños: pequeño, mediano y grande
El tamaño pequeño utiliza motores n20 de unos 10 gramos de peso incluidos reductora, el tamaño mediano motores paso a paso Nema 17 de bajo coste, y el robot grande utiliza Nema 17 con reductora planetarias, lo cual multiplica su peso x2 o por 3 llegando a 600 gramos por conjunto reductora + motor. Tambien se muestran varios tipos de sistemas de tracción externa del robot pequeño: "ruedas cuadradas" "cuadrados con dos garras" "cuadradas con 4 palas" "garras en 5 puntas con palas" y "cinco palas para agua o arena".





TRIMESTRE POSTERIOR A LA FINALIZACIÓN DEL PLAZO DE EJECUCIÓN
Aplicación de lo aprendido y lo innovado a dos nuevos tipos de robots, y prueba de concepto en el puerto de Alicante con robots de la EV3 y de la EV4, conectados al software de nube de la EV3
Esta evolución se da en el trimestre posterior a la finalización del plazo de los 6 meses que se daban para la ejecución de la Idea, son los meses de Abril, Mayo y Junio, parte de esta evolución se cito como tercera evolución ampliada, que se gesto mientras finalizaba el plazo de ejecución, físicamente son fáciles de diferenciar, ya que se utiliza material color cobre.
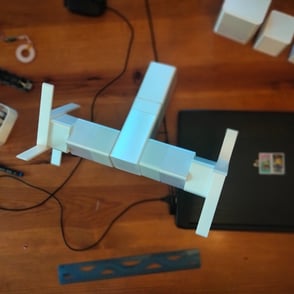
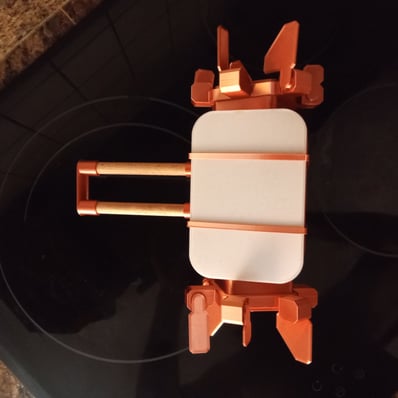
ROBOT BUTTERFLY a escala real , evolución 4, etiquetados como F28 EV4 (por los 28 cm de ancho, distancia entre sistemas de traccion exteriores)
Los componentes mecánicos del robot Butterfly, su combinación con otros materiales en los sistemas de tracción "en este caso madera" están listos para a utilizar nuevos materiales en este caso PET. Una vez fabricadas dos unidades completas de este robot con las impresoras 3D, podremos plantearnos el coste de los moldes para un primera serie pre-industrial fabricada por inyección en los próximos trimestres.
BUTTERFLY tiene dos configuraciones a probar con respecto a al tracción mecánica debido al elevado diámetro de sus "ruedas" 60 cm:
Fase 1: utiliza una configuración es de eje desde dentro a fuera, es decir rompe la estanqueidad pero nos permite probar fuera del agua el motor y reductora adecuados sin tener que rediseñar la tracción magnética al no utilizarla.
Fase 2: una vez el conjunto motor reductora tenga fuerza suficiente para mover las "ruedas de 60 cm", se rediseñara la tracción magnética por eje virtual para poder ser estanco de nuevo y probar sobre el agua y bajo ella, será un robot mixto, que podrá funcionar fuera del agua, con la consiguiente complejidad de tener que soportar su peso cuando avanza, cosa que en el agua es mucho mas sencilla al equilibrar su flotabilidad negativa o positiva a favor del movimiento buscado
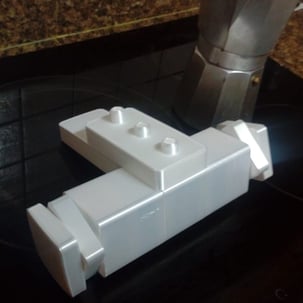
ROBOT BULL a escala real , evolución 4, etiquetados como B14 EV4 (por los 14cm de ancho, distancia entre sistemas de tracción exteriores)
Los componentes mecánicos del robot BULL están preparados también para su construcción en PET, el robot BULL intencionadamente no combina materiales y tiene una junta para la estanqueidad, junta que será retirada una vez el sistema de energía sea estable en su funcionamiento y la programación de los chips de forma inalámbrica también sea estable. BULL esta diseñado para ser de uso mixto, en tierra y en agua, sobre ella y bajo ella, BULL utiliza transmisión magnética de eje virtual,
ELECTRONICA - SIGUIENTE FASE DISEÑOS DE PCB PARA LA PRE-INDUSTRIALIZACIÓN
La electronica de control, la electronica de gestión de la energía, el sistema de comportamiento y la electroncia de captación e señales "sensores" están preparadas para la siguiente fase: diseñar los pcbs para integrar modulos OEM y desde ahí poder lanzar un serie pre-industrial de varios robots en los próximos trimestres
COMIENZA EL CAMINO HACIA PROTOTIPOS DISEÑADOS PARA LA FUTURA FASE PRE-INDUSTRIAL



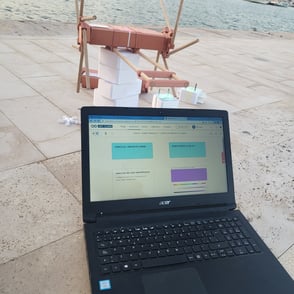







Fotos y videos de la PoC en el puerto de Alicante, esta prueba se realizo con robots de la Evolución 3 y con robots de la evolución 4, en Julio, dentro del trimestre posterior a la finalización del plazo de ejecución de la convocatoria
Fotos del robot Bull B14 Ev4


EVOLUCIÓN CUARTA
Videos de la PoC realizada en Alicante en Julio 2023
Robots y balizas de la evolución tercera Ev3 unidos en malla con dos robots F28 de la evolución tercera ampliada o EV4. Están conectados a una nube programada y configurada en Arduino IoT Cloud, misma nube que utilizaba la EV3
Robot Ev4 Butterfly F28 con "rueda cuadrada" - Julio 2023 - Proyecto CRANC - Ports 4.0
Prueba de control directo desde el software de control de malla desde la nube en el Dashboard especifico para el robot Ev4 F28 ID1. Al llevar "ruedas cuadradas" muy pequeñas los motores tienen potencia suficiente, queda pendiente probar aumento en la velocidad de giro para ver si avanza o colapsa
Robot pequeño Ev3 con sonda Dual de temperatura - control directo - Proyecto CRANC - Ports 4.0
Control directo desde la nube de un robot pequeño Ev3 montado con dos sensores de temperatura Duales que emiten directamente a la nube en tiempo real, utilización del Dashboard de control de la unidad R8 ID1.
Robot pequeño y grande Ev3 con sonda de calidad de aire - julio 2023 - Proyecto CRANC - Ports 4.0
Control directo desde la nube de un robot pequeño Ev3 montado con dos sensores de temperatura Duales que emiten directamente a la nube en tiempo real, utilización del Dashboard de control de la unidad R8 ID1.
Robot Ev4 Butterfly girando parte izquierda Julio 2023 - Proyecto CRANC - Ports 4.0
El robot Butterfly F28 esta conectado a la nube e interactuando con la malla. Esta apoyado en varios robots Ev3 medianos y grandes para servirle de peana. El F28 lleva motores paso a paso Nema 17 de alto Torque con Reductora Planetaria 40 a 1, cada conjunto pesa mas de 600 gramos. Su sistema de tracción externo tiene 60 cm de diámetro y los motores no tienen fuerza para moverlo, creemos que porque necesitan mas potencia eléctrica "amperios" desde el gestor de energía.